Loading...
Searching...
No Matches
neo6.c File Reference
NEO-6M GPS module implementation file. More...
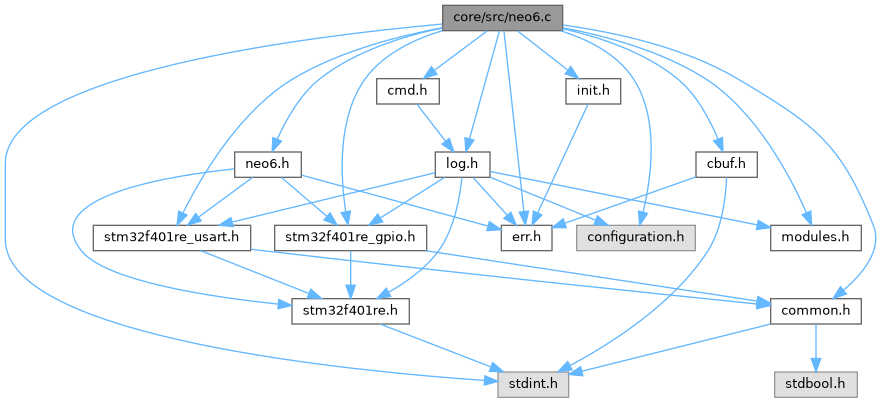
#include <stdint.h>#include "neo6.h"#include "cmd.h"#include "common.h"#include "err.h"#include "init.h"#include "log.h"#include "modules.h"#include "stm32f401re_gpio.h"#include "stm32f401re_usart.h"#include "cbuf.h"#include "configuration.h"
Include dependency graph for neo6.c:
Go to the source code of this file.
Classes | |
| struct | neo6_handle_s |
| Internal structure representing the NEO-6 hardware instance. More... | |
| struct | internal_state_s |
| Internal state of the SysTick driver. More... | |
Functions | |
| static ERR_te | neo6_calc_checksum (char *msg, uint32_t msg_len, uint8_t *checksum_o) |
| Computes the NMEA checksum of a sentence by XORing all bytes between '$' and '*'. | |
| static ERR_te | neo6_process_msg (uint8_t *msg, uint32_t msg_len) |
| Verifies the checksum of a received NMEA sentence and dispatches it to the appropriate parser. | |
| static ERR_te | neo6_process_rmc (char **tokens) |
| Parses an RMC sentence and updates time, date, latitude, and longitude. | |
| static ERR_te | neo6_process_vtg (char **tokens) |
| Parses a VTG sentence and updates movement direction and speed. | |
| static ERR_te | neo6_process_gga (char **tokens) |
| Parses a GGA sentence and updates fix status, satellites used, orthometric height, and geoid separation. | |
| static ERR_te | neo6_process_gsa (char **tokens) |
| Parses a GSA sentence and updates fix type, PDOP, HDOP, and VDOP. | |
| static ERR_te | neo6_process_gsv (char **tokens) |
| Parses a GSV sentence and updates the total satellite count. | |
| static ERR_te | neo6_dumpnmea_handler (uint32_t argc, char **argv) |
| CLI handler for the "dumpnmea" command. Enables or disables raw NMEA logging. | |
| ERR_te | neo6_init_subsys (void) |
| Initializes the NEO-6 subsystem. | |
| ERR_te | neo6_deinit_subsys (void) |
| Deinitializes the NEO-6 subsystem. | |
| ERR_te | neo6_start_subsys (void) |
| Starts the NEO-6 subsystem. | |
| ERR_te | neo6_stop_subsys (void) |
| Stops the NEO-6 subsystem. | |
| ERR_te | neo6_init_handle (NEO6_CFG_ts *neo6_cfg, NEO6_HANDLE_ts **neo6_handle_o) |
| Initializes the NEO-6 hardware handle. | |
| ERR_te | neo6_run (void) |
| Processes received NMEA data. | |
| ERR_te | neo6_get_info (NEO6_INFO_ts **neo6_info_o) |
| Returns a pointer to the internal GPS data structure. | |
| void | usart6_irq_data_recv_callback (uint8_t data) |
| USART RXNE interrupt callback. Writes the received byte into the USART receive buffer. | |
Variables | |
| static uint8_t | usart_data_recv_cbuf_mem [128] |
| Backing memory for the USART receive circular buffer. | |
| static uint8_t | nmea_cbuf_mem [128] |
| Backing memory for the NMEA sentence accumulation buffer. | |
| static struct internal_state_s | internal_state |
| Singleton instance of the NEO-6 subsystem internal state. | |
| static CMD_INFO_ts | neo6_cmds [] |
| Table of CLI commands registered by the NEO-6 subsystem. | |
| static CMD_CLIENT_INFO_ts | neo6_cmd_client_info |
| Registration descriptor passed to the command subsystem. | |
Detailed Description
NEO-6M GPS module implementation file.
- Version
- 0.1
- Date
- 2026-02-03
- Copyright
- Copyright (c) 2026
Definition in file neo6.c.
Macro Definition Documentation
◆ VTG_TMG_T_DEGREE_POS
| #define VTG_TMG_T_DEGREE_POS 1 |
◆ VTG_TMG_T_POS
◆ VTG_TMG_M_DEGREE_POS
| #define VTG_TMG_M_DEGREE_POS 3 |
◆ VTG_TMG_M_POS
◆ VTG_SPEED_KNOTS_POS
◆ VTG_SPEED_N_POS
◆ VTG_SPEED_OVER_GROUND_POS
◆ VTG_SPEED_OVER_GROUND_K_POS
◆ VTG_MODE_INDICATOR_POS
◆ GGA_UTC_POS
◆ GGA_LAT_POS
◆ GGA_LAT_DIR_POS
◆ GGA_LON_POS
◆ GGA_LON_DIR_POS
◆ GGA_QUALITY_FIX_POS
◆ GGA_NUM_SATS_POS
| #define GGA_NUM_SATS_POS 7 |
◆ GGA_HDOP_POS
◆ GGA_ORTH_HEIGHT_POS
| #define GGA_ORTH_HEIGHT_POS 9 |
◆ GGA_ORTH_HEIGHT_UNIT_POS
| #define GGA_ORTH_HEIGHT_UNIT_POS 10 |
◆ GGA_GEOID_SEP_POS
◆ GGA_GEOID_SEP_UNIT_POS
◆ GGA_DATA_REC_AGE_POS
| #define GGA_DATA_REC_AGE_POS 13 |
◆ GGA_REF_STAT_ID_POS
◆ GSA_MODE_POS
◆ GSA_FIX_TYPE_POS
| #define GSA_FIX_TYPE_POS 2 |
◆ GSA_PRN_NUM_POS
◆ GSA_PDOP_POS
◆ GSA_HDOP_POS
◆ GSA_VDOP_POS
◆ GSV_NUM_OF_MESSAGES_POS
| #define GSV_NUM_OF_MESSAGES_POS 1 |
◆ GSV_NUM_OF_THIS_MESSAGE_POS
| #define GSV_NUM_OF_THIS_MESSAGE_POS 2 |
◆ GSV_NUM_SATS_VISIBLE_POS
| #define GSV_NUM_SATS_VISIBLE_POS 3 |
◆ GSV_SV_PRN_NUM_POS
◆ GSV_ELEVATION_POS
| #define GSV_ELEVATION_POS 5 |
◆ GSV_AZIMUTH_POS
| #define GSV_AZIMUTH_POS 6 |
◆ GSV_SNR_POS
| #define GSV_SNR_POS 7 |
Variable Documentation
◆ usart_data_recv_cbuf_mem
|
static |
◆ nmea_cbuf_mem
|
static |
◆ internal_state
|
static |
◆ neo6_cmds
|
static |
Initial value:
= {
{
.name = "dumpnmea",
.help = "Dumps raw NMEA messages, usage: neo6 dumpnmea <true|false>",
.handler = neo6_dumpnmea_handler
},
}
static ERR_te neo6_dumpnmea_handler(uint32_t argc, char **argv)
CLI handler for the "dumpnmea" command. Enables or disables raw NMEA logging.
Definition neo6.c:864
Table of CLI commands registered by the NEO-6 subsystem.
Registered with the command subsystem via neo6_cmd_client_info during neo6_init_subsys.
Definition at line 177 of file neo6.c.
177 {
178 {
179 .name = "dumpnmea",
180 .help = "Dumps raw NMEA messages, usage: neo6 dumpnmea <true|false>",
181 .handler = neo6_dumpnmea_handler
182 },
183};
◆ neo6_cmd_client_info
|
static |
Initial value:
= {
.cmds_ptr = neo6_cmds,
.name = "neo6",
.log_level_ptr = &internal_state.log_level
}
static struct internal_state_s internal_state
Singleton instance of the SysTick driver internal state.
Definition arm_cortex_m4_systick.c:33
static CMD_INFO_ts neo6_cmds[]
Table of CLI commands registered by the NEO-6 subsystem.
Definition neo6.c:177
Registration descriptor passed to the command subsystem.
Bundles the command table, its size, the subsystem name prefix used on the CLI, and a pointer to the runtime log-level variable.
Definition at line 192 of file neo6.c.
192 {
193 .cmds_ptr = neo6_cmds,
195 .name = "neo6",
196 .log_level_ptr = &internal_state.log_level
197};