Public functions to interact with the NEO-6 GPS subsystem. More...

Functions | |
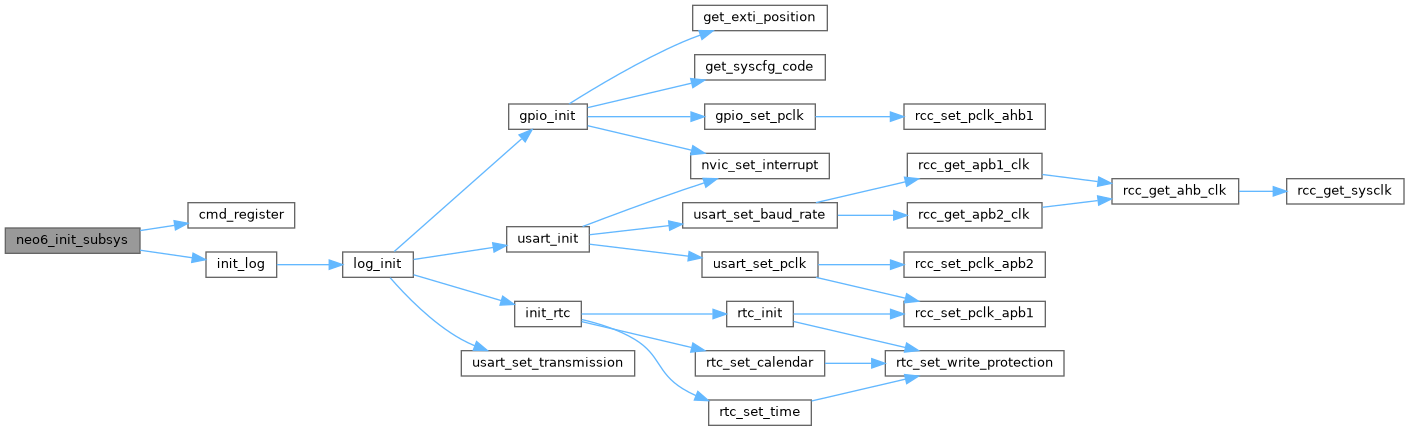
| ERR_te | neo6_init_subsys (void) |
| Initializes the NEO-6 subsystem. | |
| ERR_te | neo6_deinit_subsys (void) |
| Deinitializes the NEO-6 subsystem. | |
| ERR_te | neo6_start_subsys (void) |
| Starts the NEO-6 subsystem. | |
| ERR_te | neo6_stop_subsys (void) |
| Stops the NEO-6 subsystem. | |
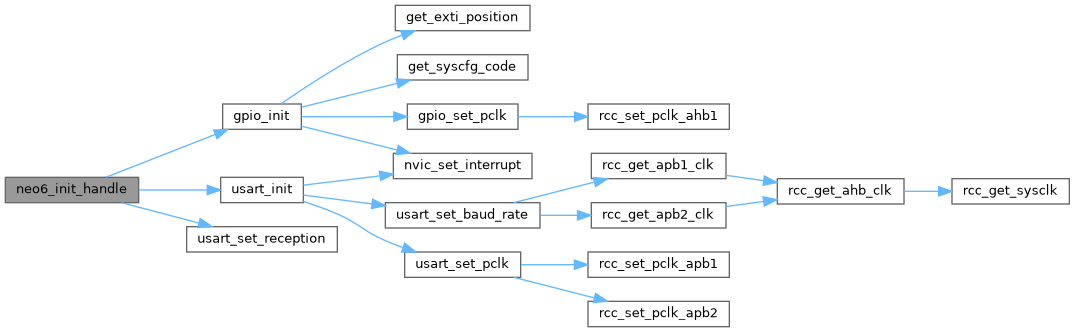
| ERR_te | neo6_init_handle (NEO6_CFG_ts *neo6_cfg, NEO6_HANDLE_ts **neo6_handle_o) |
| Initializes the NEO-6 hardware handle. | |
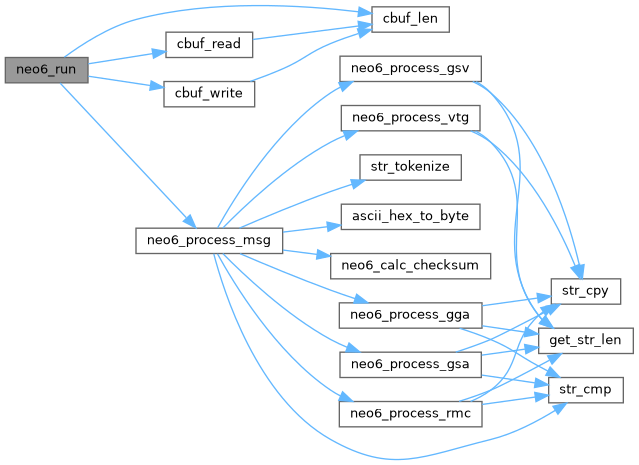
| ERR_te | neo6_run (void) |
| Processes received NMEA data. Must be called periodically. | |
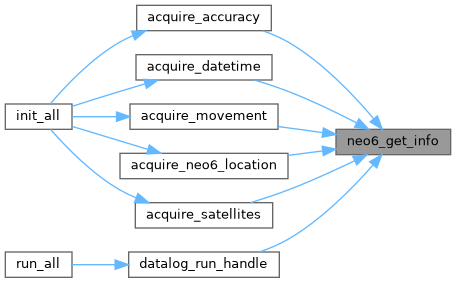
| ERR_te | neo6_get_info (NEO6_INFO_ts **neo6_info_o) |
| Returns a pointer to the internal GPS data structure. | |
Detailed Description
Public functions to interact with the NEO-6 GPS subsystem.
Function Documentation
◆ neo6_init_subsys()
| ERR_te neo6_init_subsys | ( | void | ) |
Initializes the NEO-6 subsystem.
Resets the internal state, initializes the USART receive circular buffers, initializes the logging dependency, and registers the CLI commands.
Must be called before any other NEO-6 API function.
- Returns
- ERR_OK on success
- ERR_MODULE_ALREADY_INITIALIZED if the subsystem is already initialized
- Propagated error from cmd_register on failure
- See also
- neo6_init_subsys
Definition at line 205 of file neo6.c.

◆ neo6_deinit_subsys()
| ERR_te neo6_deinit_subsys | ( | void | ) |
Deinitializes the NEO-6 subsystem.
Resets the internal state to zero and deregisters the CLI commands. The subsystem must be stopped before calling this function.
- Returns
- ERR_OK on success
- ERR_DEINITIALIZATION_FAILURE if the subsystem is not initialized or still running
- Propagated error from cmd_deregister on failure
- See also
- neo6_deinit_subsys
Definition at line 246 of file neo6.c.

◆ neo6_start_subsys()
| ERR_te neo6_start_subsys | ( | void | ) |
Starts the NEO-6 subsystem.
- Returns
- ERR_OK on success
- ERR_UNKNOWN if the subsystem is not initialized or already started
- See also
- neo6_start_subsys
Definition at line 274 of file neo6.c.

◆ neo6_stop_subsys()
| ERR_te neo6_stop_subsys | ( | void | ) |
Stops the NEO-6 subsystem.
- Returns
- ERR_OK on success
- ERR_UNKNOWN if the subsystem is not initialized or already stopped
- See also
- neo6_stop_subsys
Definition at line 298 of file neo6.c.
◆ neo6_init_handle()
| ERR_te neo6_init_handle | ( | NEO6_CFG_ts * | neo6_cfg, |
| NEO6_HANDLE_ts ** | neo6_handle_o ) |
Initializes the NEO-6 hardware handle.
Configures the USART peripheral with interrupt-driven reception and initializes both the RX and TX GPIO pins in alternate function mode.
- Note
- Only one handle instance is supported. Calling this function a second time without deinitialization returns an error.
- Parameters
-
[in] neo6_cfg Pointer to the NEO-6 configuration structure. [out] neo6_handle_o Pointer to a handle pointer that will be set to the initialized instance.
- Returns
- ERR_OK on success
- ERR_INITIALIZATION_FAILURE if a handle is already initialized, or if the USART or GPIO pointers in
neo6_cfgare NULL
- See also
- neo6_init_handle
Definition at line 322 of file neo6.c.

◆ neo6_run()
| ERR_te neo6_run | ( | void | ) |
Processes received NMEA data. Must be called periodically.
Drains bytes from the USART receive circular buffer into the NMEA accumulation buffer. Each time a newline character is detected, the complete sentence is extracted, its checksum is verified, and it is dispatched to the appropriate parser (RMC, VTG, GGA, GSA, or GSV).
Parsed values are written directly into the internal NEO6_INFO_ts structure and are accessible via neo6_get_info.
- Note
- Known limitation: if a received chunk contains the end of one sentence and the start of the next, the second sentence is lost. This does not currently cause observable issues.
- Returns
- ERR_OK on success
- ERR_DATA_ACQUISITION_FAILURE if a sentence fails its checksum verification
- ERR_UNKNOWN if a checksum cannot be computed (malformed sentence)
Processes received NMEA data. Must be called periodically.
- See also
- neo6_run
Definition at line 387 of file neo6.c.

◆ neo6_get_info()
| ERR_te neo6_get_info | ( | NEO6_INFO_ts ** | neo6_info_o | ) |
Returns a pointer to the internal GPS data structure.
The returned pointer is valid for the lifetime of the subsystem. The structure is updated in place on each successful NMEA parse. The caller must not free or modify the returned pointer.
- Parameters
-
[out] neo6_info_o Pointer to a pointer that will be set to the internal NEO6_INFO_ts structure.
- Returns
- ERR_OK always
- See also
- neo6_get_info
Definition at line 430 of file neo6.c.