Public initialization functions for shared dependencies. More...

Functions | |
| ERR_te | init_log (void) |
| Initializes the logging subsystem. | |
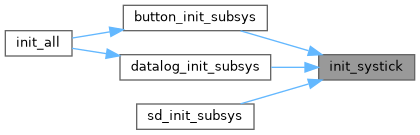
| ERR_te | init_systick (void) |
| Initializes the SysTick timer. | |
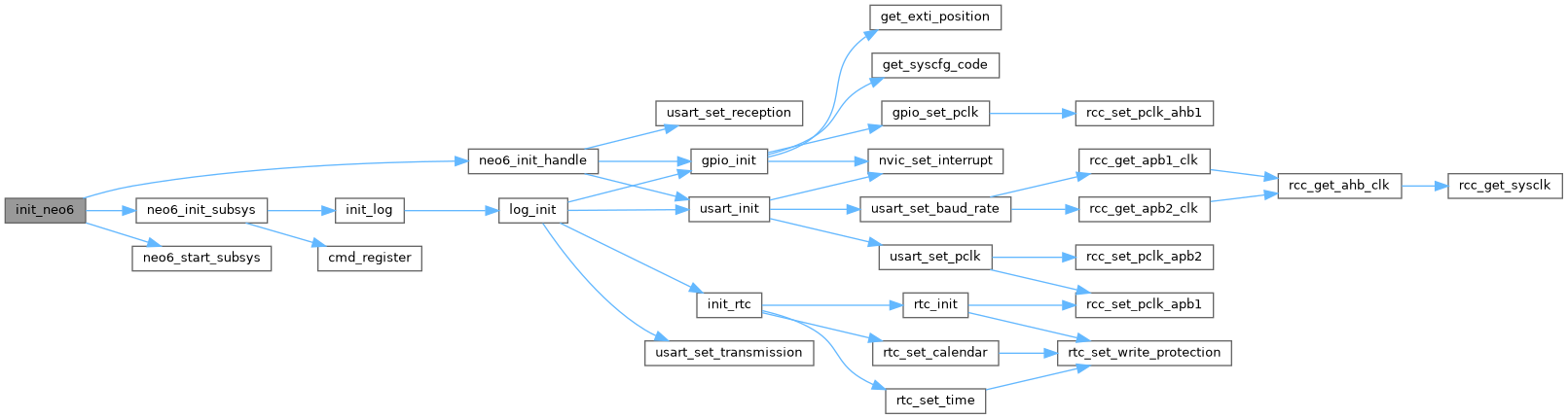
| ERR_te | init_neo6 (void) |
| Initializes the NEO-6 GPS module. | |
| ERR_te | init_rtc (void) |
| Initializes the RTC peripheral and sets a default calendar and time. | |
Detailed Description
Public initialization functions for shared dependencies.
Function Documentation
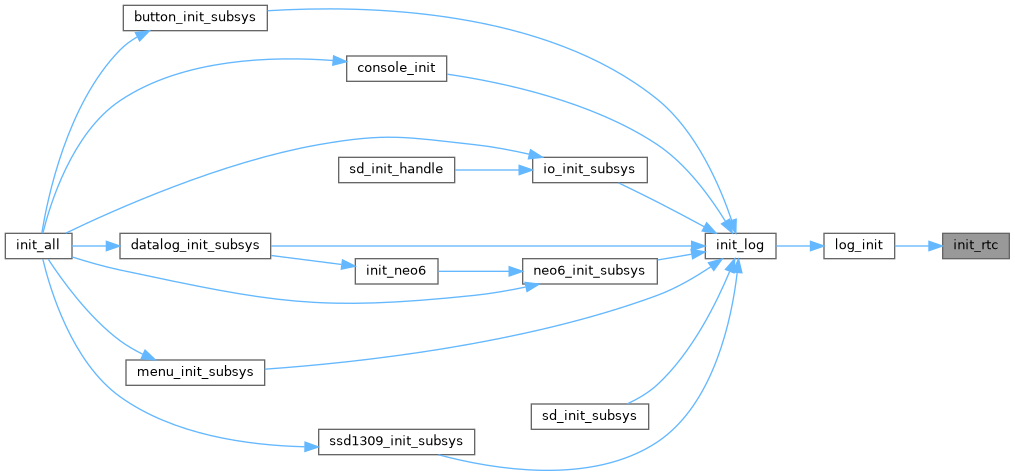
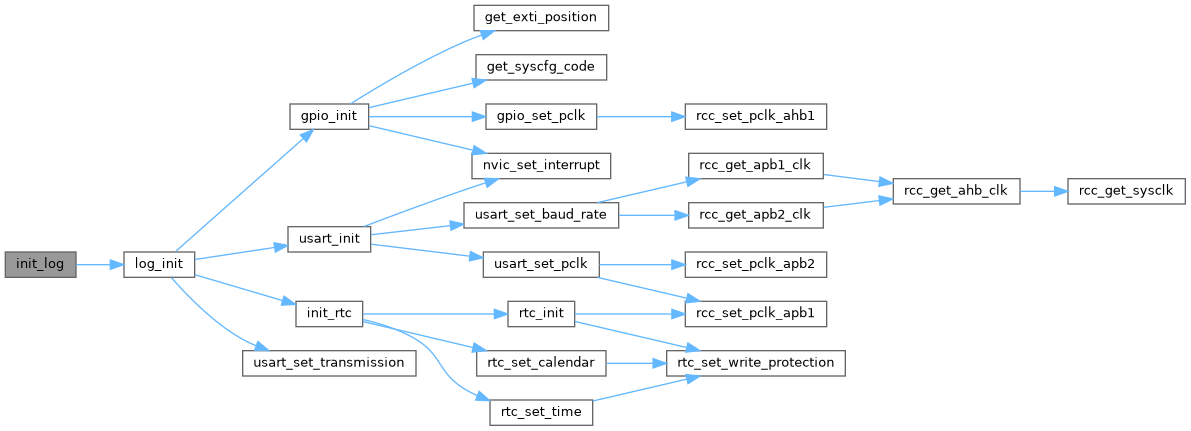
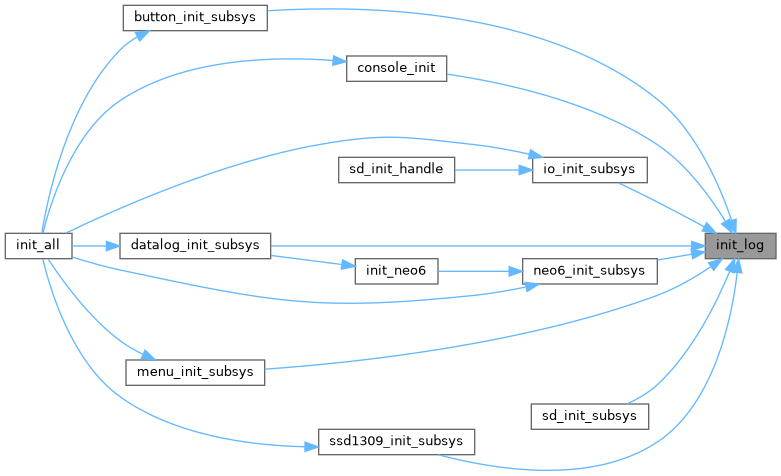
◆ init_log()
| ERR_te init_log | ( | void | ) |
Initializes the logging subsystem.
Configures the log module with a fixed hardware target: USART1 at 115200 baud on GPIOA pin 9 (alternate function AF7).
- Returns
- ERR_OK on success
- Propagated error from log_init on failure
- See also
- init_log
Definition at line 25 of file init.c.
◆ init_systick()
| ERR_te init_systick | ( | void | ) |
Initializes the SysTick timer.
Configures SysTick to use the processor clock source with interrupt generation enabled, providing the system millisecond tick used by systick_get_ms.
- Returns
- ERR_OK on success
- Propagated error from systick_init on failure
- See also
- init_systick
Definition at line 40 of file init.c.

◆ init_neo6()
| ERR_te init_neo6 | ( | void | ) |
Initializes the NEO-6 GPS module.
Initializes the NEO-6 subsystem and registers a handle configured for USART6 at 9600 baud, with RX on GPIOA pin 12 and TX on GPIOA pin 11 (alternate function AF8). Starts the subsystem after handle initialization.
- Returns
- ERR_OK on success
- Propagated error from the last failing NEO-6 call on failure
- Note
- Errors from intermediate steps (subsys init, handle init) are overwritten by subsequent calls. Only the last error is returned.
- See also
- init_neo6
Definition at line 52 of file init.c.

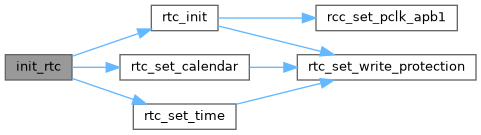
◆ init_rtc()
| ERR_te init_rtc | ( | void | ) |
Initializes the RTC peripheral and sets a default calendar and time.
Initializes the RTC hardware. If the RTC is already initialized (ERR_MODULE_ALREADY_INITIALIZED), the function returns immediately without overwriting the current time, preserving any previously set value.
If initialization succeeds, sets the calendar to Thursday, 29 January 2026 and the time to 00:00:00 as a compile-time default.
- Returns
- ERR_OK on success
- ERR_MODULE_ALREADY_INITIALIZED if the RTC was already initialized
- Propagated error from rtc_init on failure
- See also
- init_rtc
Definition at line 72 of file init.c.