Loading...
Searching...
No Matches
NEO-6 Public APIs
Functions | |
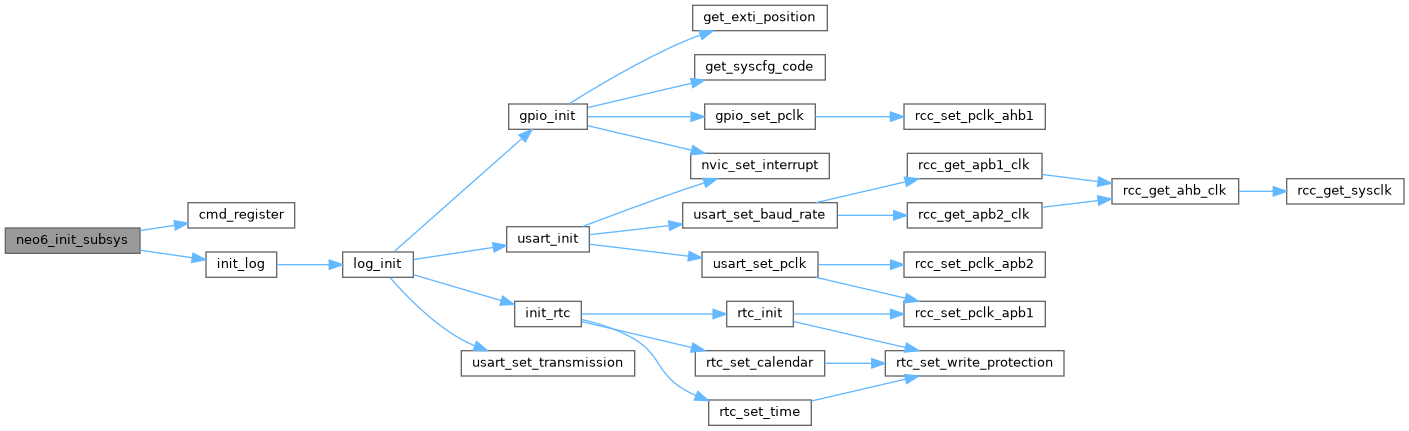
| ERR_te | neo6_init_subsys (void) |
| Initializes the NEO-6 subsystem. | |
| ERR_te | neo6_deinit_subsys (void) |
| Deinitializes the NEO-6 subsystem. | |
| ERR_te | neo6_start_subsys (void) |
| Starts the NEO-6 subsystem. | |
| ERR_te | neo6_stop_subsys (void) |
| Stops the NEO-6 subsystem. | |
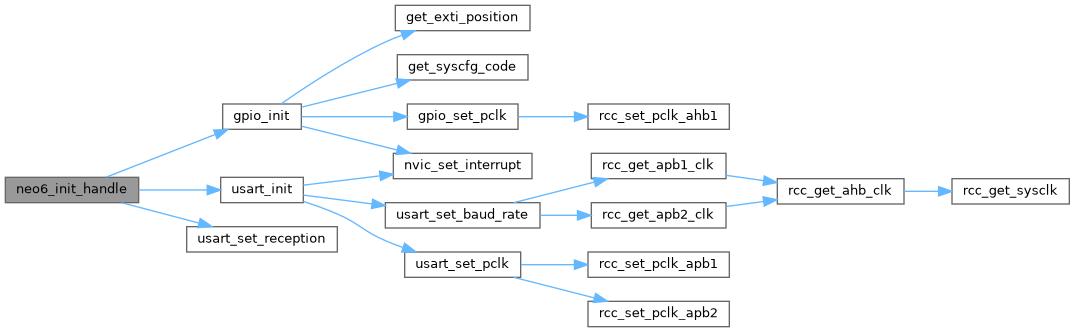
| ERR_te | neo6_init_handle (NEO6_CFG_ts *neo6_cfg, NEO6_HANDLE_ts **neo6_handle_o) |
| Initializes the NEO-6 hardware handle. | |
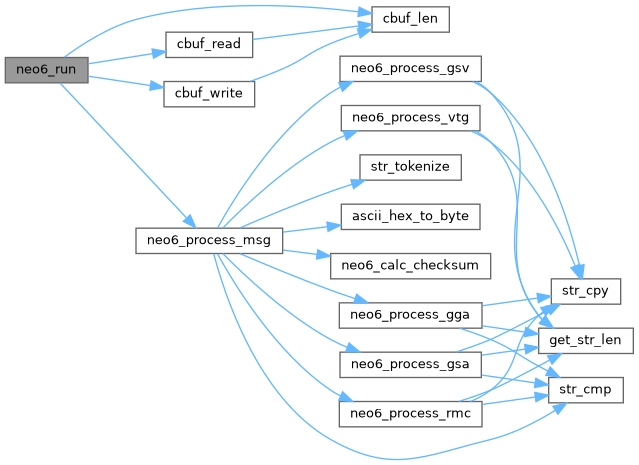
| ERR_te | neo6_run (void) |
| Processes received NMEA data. | |
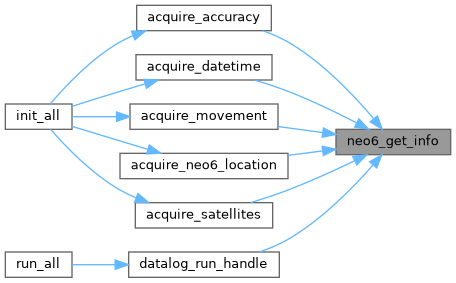
| ERR_te | neo6_get_info (NEO6_INFO_ts **neo6_info_o) |
| Returns a pointer to the internal GPS data structure. | |
Detailed Description
Function Documentation
◆ neo6_init_subsys()
| ERR_te neo6_init_subsys | ( | void | ) |
Initializes the NEO-6 subsystem.
- See also
- neo6_init_subsys
Definition at line 205 of file neo6.c.
205 {
206 ERR_te err;
207
210 }
211
222
223 init_log();
224
227 LOG_ERROR(
228 internal_state.subsys,
229 internal_state.log_level,
230 "neo6_init_subsys: cmd_register error"
231 );
232
233 return err;
234 }
235
236 LOG_INFO(
237 internal_state.subsys,
238 internal_state.log_level,
239 "neo6_init_subsys: subsys initialized"
240 );
241
243}
static struct internal_state_s internal_state
Singleton instance of the SysTick driver internal state.
Definition arm_cortex_m4_systick.c:33
ERR_te cmd_register(CMD_CLIENT_INFO_ts *cmd_client_info)
Registers a client with the command subsystem.
Definition cmd.c:51
static CMD_CLIENT_INFO_ts neo6_cmd_client_info
Registration descriptor passed to the command subsystem.
Definition neo6.c:192
static uint8_t nmea_cbuf_mem[128]
Backing memory for the NMEA sentence accumulation buffer.
Definition neo6.c:83
static uint8_t usart_data_recv_cbuf_mem[128]
Backing memory for the USART receive circular buffer.
Definition neo6.c:75
Here is the call graph for this function:
Here is the caller graph for this function:

◆ neo6_deinit_subsys()
| ERR_te neo6_deinit_subsys | ( | void | ) |
Deinitializes the NEO-6 subsystem.
- See also
- neo6_deinit_subsys
Definition at line 246 of file neo6.c.
246 {
249
252 return err;
253 }
254 }
255 else {
256 LOG_ERROR(
257 internal_state.subsys,
258 internal_state.log_level,
259 "neo6_deinit_subsys: subsys is not initialized or stopped"
260 );
261
263 }
264
265 LOG_INFO(
266 internal_state.subsys,
267 internal_state.log_level,
268 "neo6_deinit_subsys: subsystem deinitialized"
269 );
271}
ERR_te cmd_deregister(CMD_CLIENT_INFO_ts const *cmd_client_info)
Deregisters a client from the command subsystem.
Definition cmd.c:66
Here is the call graph for this function:

◆ neo6_start_subsys()
| ERR_te neo6_start_subsys | ( | void | ) |
Starts the NEO-6 subsystem.
- See also
- neo6_start_subsys
Definition at line 274 of file neo6.c.
274 {
277
278 LOG_INFO(
279 internal_state.subsys,
280 internal_state.log_level,
281 "neo6_start_subsys: subsys started"
282 );
283 }
284 else {
285 LOG_ERROR(
286 internal_state.subsys,
287 internal_state.log_level,
288 "neo6_start_subsys: subsys not initialized or already started"
289 );
290
292 }
293
295}
Here is the caller graph for this function:

◆ neo6_stop_subsys()
| ERR_te neo6_stop_subsys | ( | void | ) |
Stops the NEO-6 subsystem.
- See also
- neo6_stop_subsys
Definition at line 298 of file neo6.c.
298 {
301
302 LOG_INFO(
303 internal_state.subsys,
304 internal_state.log_level,
305 "neo6_stop_subsys: subsys stopped"
306 );
307 }
308 else {
309 LOG_ERROR(
310 internal_state.subsys,
311 internal_state.log_level,
312 "neo6_stop_subsys: subsys not initialized or already already stopped"
313 );
314
316 }
317
319}
◆ neo6_init_handle()
| ERR_te neo6_init_handle | ( | NEO6_CFG_ts * | neo6_cfg, |
| NEO6_HANDLE_ts ** | neo6_handle_o ) |
Initializes the NEO-6 hardware handle.
- See also
- neo6_init_handle
Definition at line 322 of file neo6.c.
322 {
324 LOG_ERROR(
325 internal_state.subsys,
326 internal_state.log_level,
327 "neo6_init_handle: handle already initialized"
328 );
329
331 }
332
334 LOG_ERROR(
335 internal_state.subsys,
336 internal_state.log_level,
337 "neo6_init_handle: No USART peripheral given"
338 );
339
341 }
343 LOG_ERROR(
344 internal_state.subsys,
345 internal_state.log_level,
346 "neo6_init_handle: No GPIO peripheral given"
347 );
348
350 }
351
359
360 USART_CFG_ts neo6_usart = { 0 };
364 usart_init(&neo6_usart);
366
367 GPIO_CFG_ts neo6_rx = { 0 };
372 gpio_init(&neo6_rx);
373
374 GPIO_CFG_ts neo6_tx = { 0 };
379 gpio_init(&neo6_tx);
380
382
384}
void gpio_init(GPIO_CFG_ts *gpio_cfg)
Initializes a GPIO pin according to the given configuration.
Definition stm32f401re_gpio.c:29
void usart_init(USART_CFG_ts *usart_cfg)
Initializes the USART peripheral with the given configuration.
Definition stm32f401re_usart.c:28
void usart_set_reception(USART_REGDEF_ts *usart_instance, EN_STATUS_te en_status)
Enables or disables the USART receiver (RE bit).
Definition stm32f401re_usart.c:139
GPIO_ALTERNATE_FUNCTION_te alternate_function
Definition stm32f401re_gpio.h:188
GPIO_ALTERNATE_FUNCTION_te gpio_alternate_function
Definition neo6.h:130
Configuration structure for initializing a USART peripheral.
Definition stm32f401re_usart.h:160
Here is the call graph for this function:
Here is the caller graph for this function:

◆ neo6_run()
| ERR_te neo6_run | ( | void | ) |
Processes received NMEA data.
Processes received NMEA data. Must be called periodically.
- See also
- neo6_run
Definition at line 387 of file neo6.c.
387 {
388 uint8_t data_len = 0;
390
391 if(data_len) {
392 uint8_t data[data_len];
393
395
397
398 for(uint32_t i = 0; i < data_len; i++) {
399 if(data[i] == '\n') {
400 uint8_t nmea_len = 0;
402
403 uint8_t nmea_msg[nmea_len];
405
406 nmea_msg[nmea_len - 2] = '\0';
407 nmea_msg[nmea_len - 1] = '\0';
408
410 LOG_INFO(
411 internal_state.subsys,
412 internal_state.log_level,
413 "%s", nmea_msg
414 );
415 }
416
417 // Process NMEA message
420 return err;
421 }
422 }
423 }
424 }
425
427}
ERR_te cbuf_read(CBUF_HANDLE_ts *cbuf_handle, uint8_t *output_buf_o)
Reads all available data from the circular buffer into an output buffer.
Definition cbuf.c:22
ERR_te cbuf_len(CBUF_HANDLE_ts const *cbuf_handle, uint8_t *len_o)
Returns the number of bytes currently stored in the circular buffer.
Definition cbuf.c:61
ERR_te cbuf_write(CBUF_HANDLE_ts *cbuf_handle, uint8_t *input_buf, uint32_t input_len)
Writes data from an input buffer into the circular buffer.
Definition cbuf.c:41
static ERR_te neo6_process_msg(uint8_t *msg, uint32_t msg_len)
Verifies the checksum of a received NMEA sentence and dispatches it to the appropriate parser.
Definition neo6.c:501
Here is the call graph for this function:
Here is the caller graph for this function:

◆ neo6_get_info()
| ERR_te neo6_get_info | ( | NEO6_INFO_ts ** | neo6_info_o | ) |
Returns a pointer to the internal GPS data structure.
- See also
- neo6_get_info
Definition at line 430 of file neo6.c.
Here is the caller graph for this function: