Loading...
Searching...
No Matches
Console Public API
Public functions to interact with the console subsystem. More...
Collaboration diagram for Console Public API:

Functions | |
| ERR_te | console_init (CONSOLE_HANDLE_ts *console_handle) |
| Initializes the console subsystem. | |
| ERR_te | console_run (void) |
| Runs the console state machine. Must be called periodically. | |
Detailed Description
Public functions to interact with the console subsystem.
Function Documentation
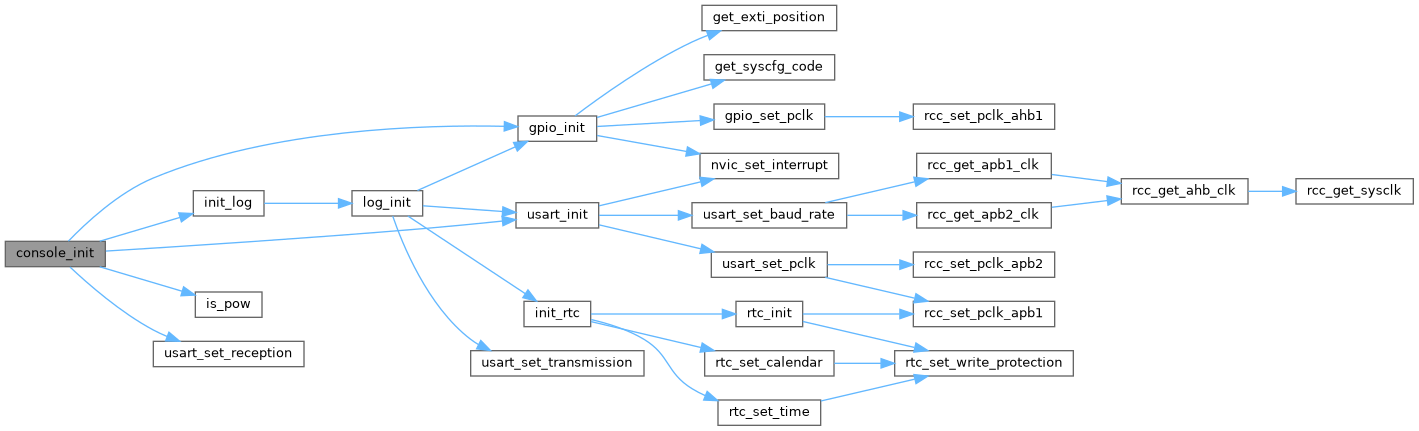
◆ console_init()
| ERR_te console_init | ( | CONSOLE_HANDLE_ts * | console_handle | ) |
Initializes the console subsystem.
Configures the internal state, initializes the RX GPIO pin in alternate function mode, and initializes the USART peripheral with interrupt-driven reception. USART reception is enabled before the function returns.
- Note
- CONFIG_CONSOLE_USART_CBUF_SIZE must be a power of two. Initialization will fail with ERR_INVALID_CONFIGURATION otherwise.
- Parameters
-
[in] console_handle Pointer to the console configuration structure.
- Returns
- ERR_OK on success
- ERR_INVALID_CONFIGURATION if the USART circular buffer size is not a power of two
- See also
- console_init
Definition at line 92 of file console.c.
92 {
95 }
96
98
99 init_log();
100
101 GPIO_CFG_ts console_rx_pin = { 0 };
106 gpio_init(&console_rx_pin);
107
108 USART_CFG_ts console_usart = { 0 };
112 usart_init(&console_usart);
113
115
117}
static struct internal_state_s internal_state
Singleton instance of the SysTick driver internal state.
Definition arm_cortex_m4_systick.c:33
void gpio_init(GPIO_CFG_ts *gpio_cfg)
Initializes a GPIO pin according to the given configuration.
Definition stm32f401re_gpio.c:29
void usart_init(USART_CFG_ts *usart_cfg)
Initializes the USART peripheral with the given configuration.
Definition stm32f401re_usart.c:28
void usart_set_reception(USART_REGDEF_ts *usart_instance, EN_STATUS_te en_status)
Enables or disables the USART receiver (RE bit).
Definition stm32f401re_usart.c:139
GPIO_ALTERNATE_FUNCTION_te gpio_alternate_function
Definition console.h:71
GPIO_ALTERNATE_FUNCTION_te alternate_function
Definition stm32f401re_gpio.h:188
Configuration structure for initializing a USART peripheral.
Definition stm32f401re_usart.h:160
Here is the call graph for this function:
Here is the caller graph for this function:

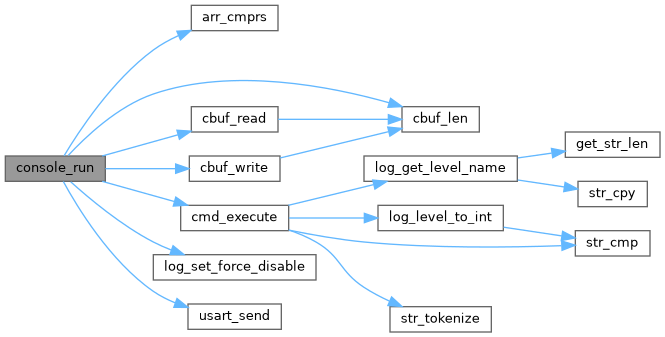
◆ console_run()
| ERR_te console_run | ( | void | ) |
Runs the console state machine. Must be called periodically.
Each call performs the following steps:
- Drains any bytes received into the USART circular buffer by the ISR.
- Handles console mode entry and exit via the Ctrl+C character.
- In console mode, echoes typed characters and accumulates them in an internal buffer.
- On carriage return, processes backspace characters, then passes the resulting command string to cmd_execute.
- Returns
- ERR_OK on success
- Propagated error from internal circular buffer or command operations
Runs the console state machine. Must be called periodically.
- See also
- console_run
Definition at line 120 of file console.c.
120 {
121 ERR_te err;
122 uint8_t data_len = 0;
123
126 return err;
127 }
128
129 if(data_len) {
130 uint8_t data[data_len];
131
134 return err;
135 }
136
141 }
145
146 uint8_t console_text_len = 0;
149 return err;
150 }
151
152 for(uint8_t i = 0; i < console_text_len + 1; i++) {
154 }
155 }
156
159
162 return err;
163 }
164
165 for(uint32_t i = 0; i < data_len; i++) {
166 if(data[i] == '\r') {
168
169 uint8_t console_text_len = 0;
172 return err;
173 }
174
175 char console_text[console_text_len];
176
179 return err;
180 }
181
182 console_text[console_text_len - 1] = '\0';
183
184 uint8_t backspace_counter = 0;
185
186 for(int16_t j = console_text_len - 1; j >= 0; j--) {
187 while(console_text[j] == 127) {
188 backspace_counter++;
189 console_text[j] = 0;
190 j--;
191 }
192
193 while(backspace_counter) {
194 console_text[j] = 0;
195 backspace_counter--;
196 j--;
197 }
198 }
199
203 cmd_execute(console_text);
204 }
205 }
206 }
207 }
208
210}
#define CONSOLE_MODE_CMD
ASCII control code used to enter and exit console mode (Ctrl+C).
Definition console.c:29
ERR_te cbuf_read(CBUF_HANDLE_ts *cbuf_handle, uint8_t *output_buf_o)
Reads all available data from the circular buffer into an output buffer.
Definition cbuf.c:22
ERR_te cbuf_len(CBUF_HANDLE_ts const *cbuf_handle, uint8_t *len_o)
Returns the number of bytes currently stored in the circular buffer.
Definition cbuf.c:61
ERR_te cbuf_write(CBUF_HANDLE_ts *cbuf_handle, uint8_t *input_buf, uint32_t input_len)
Writes data from an input buffer into the circular buffer.
Definition cbuf.c:41
ERR_te cmd_execute(char *console_text)
Parses and executes a command from a console text string.
Definition cmd.c:81
void arr_cmprs(char *arr, uint8_t len)
Compresses an array by removing null bytes and shifting remaining elements left.
Definition common.c:231
ERR_te log_set_force_disable(bool bool_status)
Enables or disables forced suppression of all log output.
Definition log.c:219
void usart_send(USART_REGDEF_ts *usart_instance, uint8_t *tx_buffer, uint32_t len)
Blocking USART transmit. Sends len bytes from tx_buffer.
Definition stm32f401re_usart.c:111
Here is the call graph for this function:
Here is the caller graph for this function:
